
|
Neu!: Video vom Smarty
Aufbau: Chassis: verklebte Carbonleisten. Akku: 1 * 145mAh Antrieb: 4 Motoren und Propeller vom X-Twin Steuerung: Die neue Elektronik Für die 5V Spannungsversorgung sorgt die Ladungspumpe MAX1686 von Maxim Empfänger: 4 Kanal IR Empfänger Daten: Gewicht: ca. 15g Länge / Breite mit Propeller: 80mm / 55mm Rotordurchmesser: 4 * 45mm 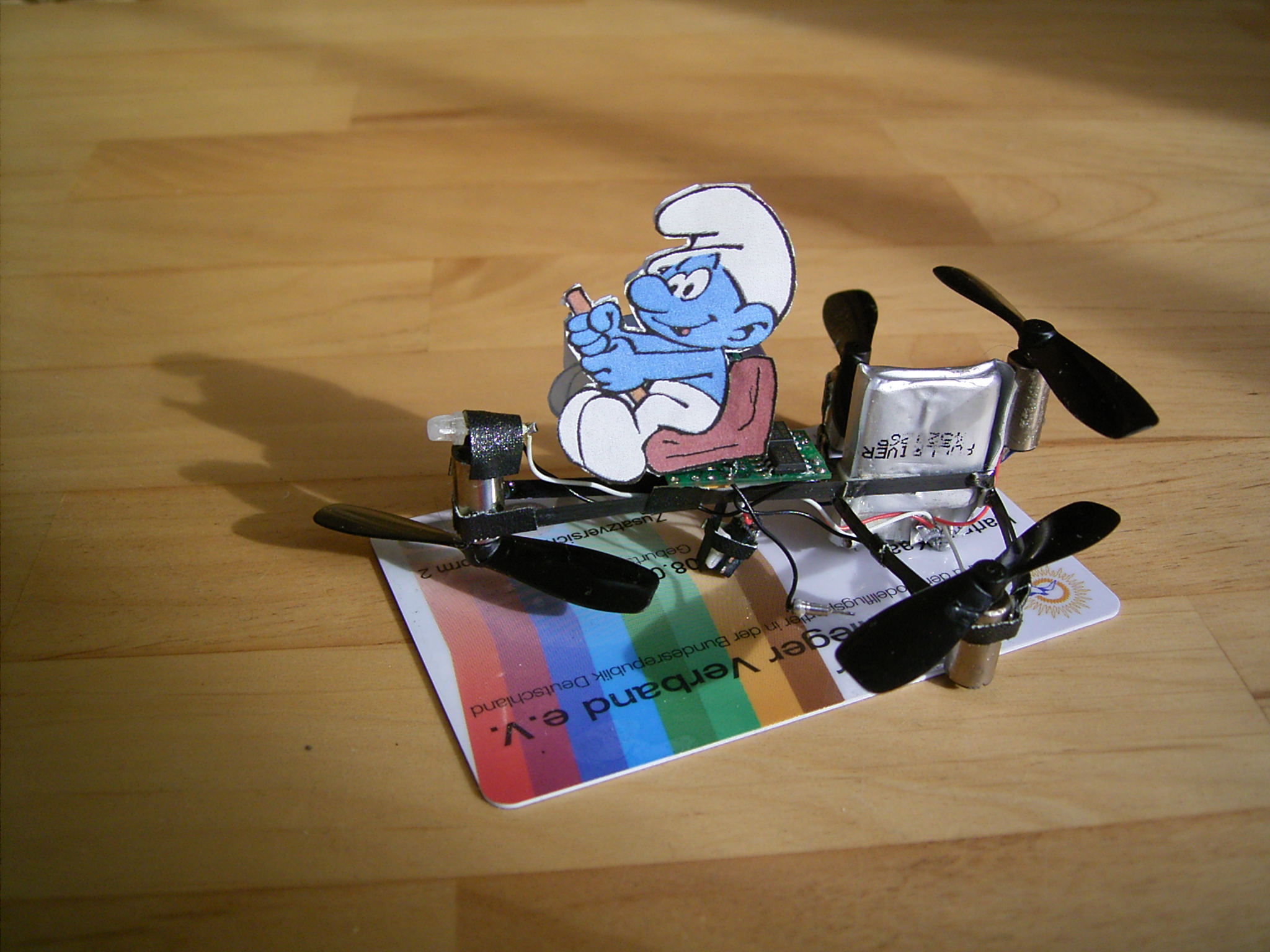




Den Smarty gibt es mittlerweile drei mal (zwei sind flugfähig). 
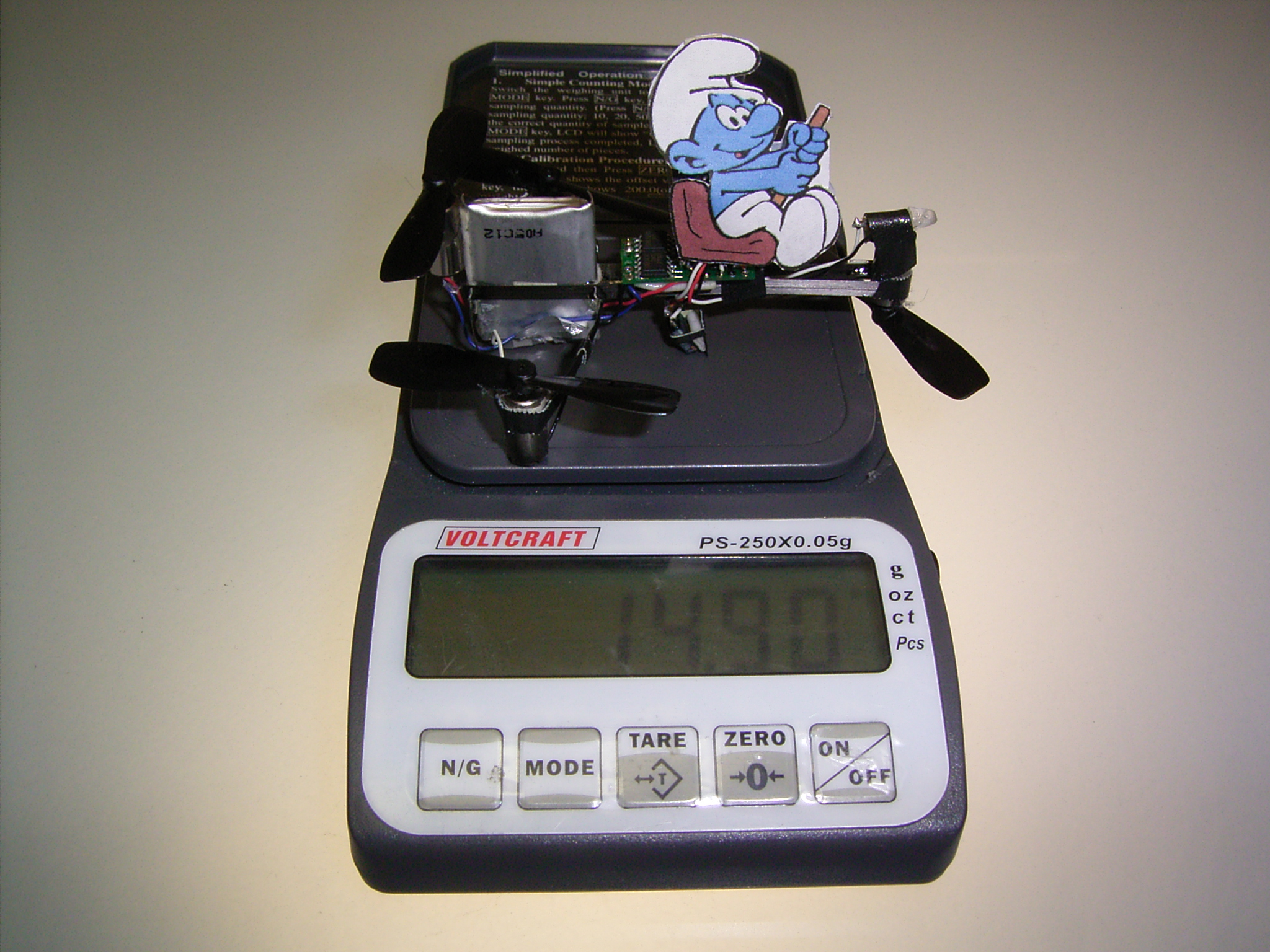
Smarty 1 Bei dem ersten Modell war es aufwendig die Motoren und den Akku zu wechseln. Aus diesem Grund habe die ihn Anfang 2007 nicht mehr repariert und die Elektronik für das dritte Modell benutzt. Der Smarty 1 dient nur noch als Ausstellungsstück. Smarty 2 Bei dem neuen Modell habe ich ein stabileres Chassis gebaut, bei dem man den Akku und die Motoren leicht tauschen kann. Gewicht: 14,9 g Akku: AHA-100 (habe ich erst vor kurzem eingebaut) Flugzeit: ca. 2 Minuten (die Motoren sind nicht mehr so gut) Smarty 3 Gewicht: 15,7 g Akku: 145mA Flugzeit: ca. 5 Minuten (die neuen Motoren vom X-Twin sind besser) _____ Das Überhitzen der Motoren ist beim Smarty im übrigen kein Problem. Da er nicht wie der Smartflyer Micro mit zwei Zellen fliegt, kann man die komplette Akkukapazität in einem leerfliegen. Die Flugeigenschaften vom Smarty waren bis vor kurzem noch sehr schlecht. Zwei entscheidende Maßnahmen führten dazu, dass der Smarty sich jetzt gut fliegen lässt. 1: Verbesserung der IR Übertragung Für die erste Version habe ich das Signal aus der Lehrer-Schüler-Buchse auf einen IR-Sender gegeben. Dies hatte den Nachteil, dass das Timing des IR-Senders (38kHz) nicht mit dem Timing vom Sender abgestimmt war, wodurch es sehr große Schwankungen bei der Datenübertragung gab. Jeder der schon mal einen Hubschrauber geflogen hat, kann sich vorstellen wie schwierig es ist, wenn die Servos der Taumelscheibe um >10% zittern. Jetzt habe ich einen eigenen Sender gebaut, wo die Datenübertragung an das IR-Signal angepasst ist. Außerdem erhöhte ich die Sendeleistung. Zusätzlich habe ich noch eine Sendeeinheit, die ich an meiner Brille befestigen kann. So zeigt der Sender automatisch immer auf das Modell. 2: Bessere Regelung Bislang hatte ich für meine Smartflyer immer einen "einfachen" PD-Regler (Smartflyer I und II einen PID-Regler) benutzt, der als Basis das Signal vom Kreisel auswertet. Die neuste Software addiert alle Bewegungen vom Kreisel und berechnet so die absolute Lage im Raum (beim Start muss das Model waagerecht stehen). Auf diesen Wert regelt ein P-Regler das Modell. Mit dem Steuerknüppel gebe ich jetzt vor, um wie viel Grad das Model von der Waagerechten Position abweichen soll. Mit diesem Regler lässt sich der kleine Flieger viel besser steuern. Bilder vom 5. Internationales Quadrocopter Fliegen in Köln 2008 


|